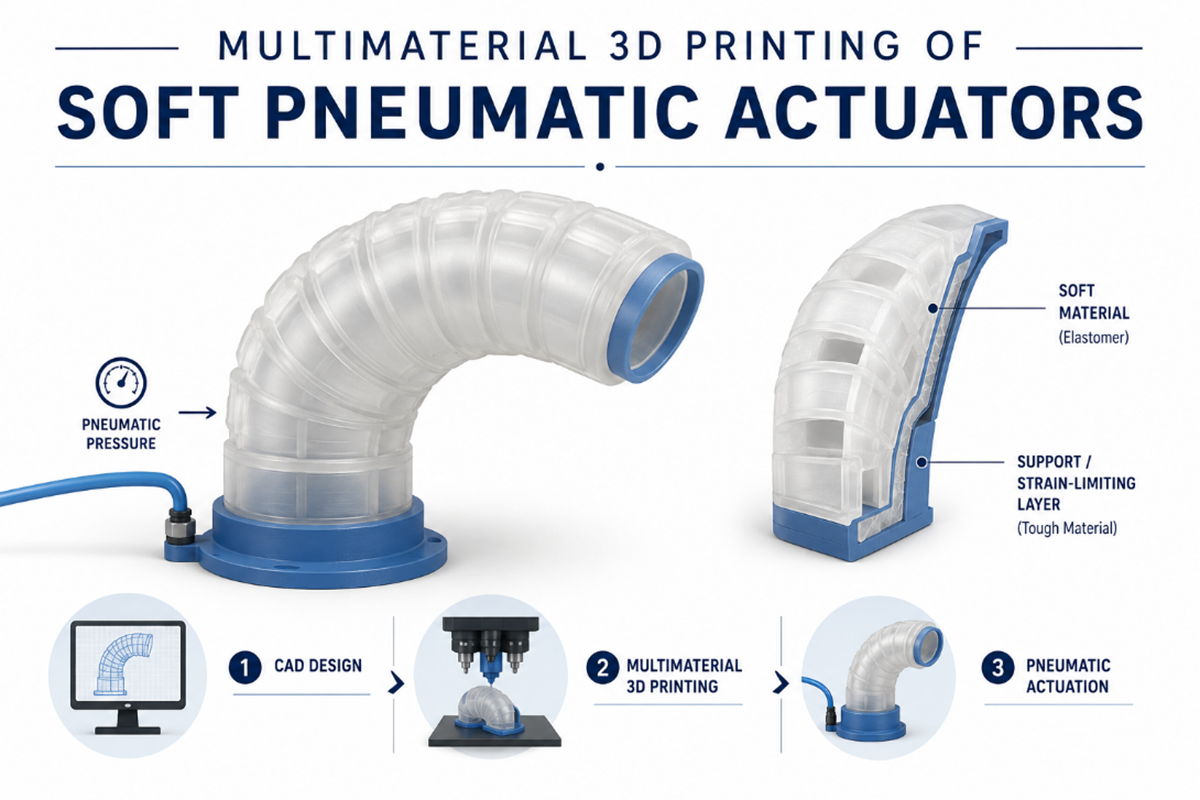
Multimaterial 3D printing of soft pneumatic actuators (SPAs)
Project Details
- Student(s): Charbel Matta
- Advisor(s): Dr. Charbel Tawk, Dr. Pierre Rahme
- Department: Industrial & Mechanical
- Academic Year(s): 2025-2026
Abstract
Soft Pneumatic actuators are widely used in soft robotic applications due to their compliance, ease of fabrication and simplicity. However, these actuators present limitations in terms of controllability and output forces. Our research focuses on the implementation of different materials with different mechanical properties within the actuator body and studying their effect of the overall actuator deformation and output force.