A Comparative Biomechanical Analysis and Material-Constrained Selection of a Quadrupedal Limb Model for Robotic Applications.
Project Details
- Student(s): Hadi Bdeir
- Advisor(s): Dr. Noel Maalouf
- Department: Mechatronics
- Academic Year(s): 2024-2025
Abstract
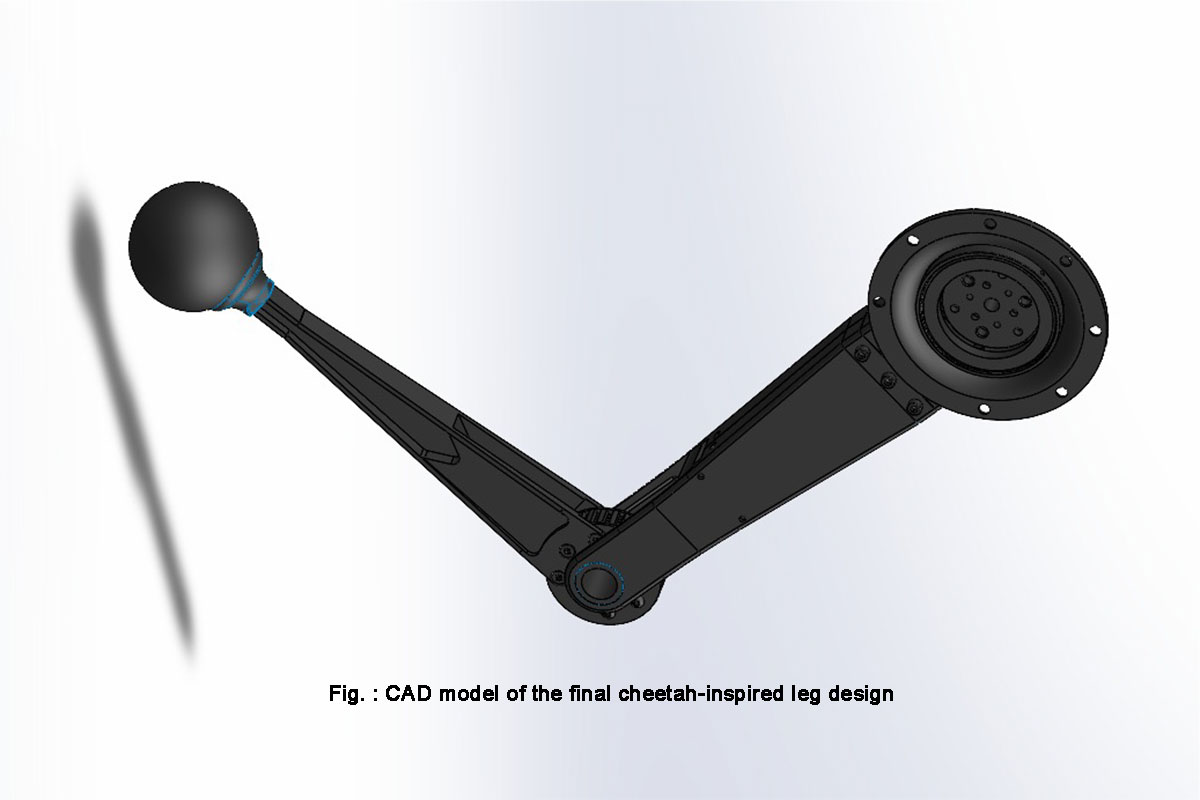
Legged robots go where wheels struggle, over steps, rocks, and uneven grounds. This makes the shape of each limb as important as the motor driving it. This work presents a 3D-printed quadruped leg that borrows from animal anatomy while remaining realistic for PLA manufacturing. After considering dog, donkey, cheetah, and mountain goat archetypes, the design converged on a cheetah-style layout: longer, lighter, partly hollow segments with most mass kept near the body to lower swing inertia and smooth control on rough terrain. A static check placed the full load on a single leg (8.34 kg, ~81.8 N) and returned essentially zero displacement and negligible strain, with a minimum safety factor of 4.6. The parts are sized for desktop printers, assemble with off-the-shelf fasteners, and are drilled and aligned to drop straight into the quadruped platform as a second limb. Nature sets the idea, PLA sets the limits, and this cheetah-inspired limb meets both.