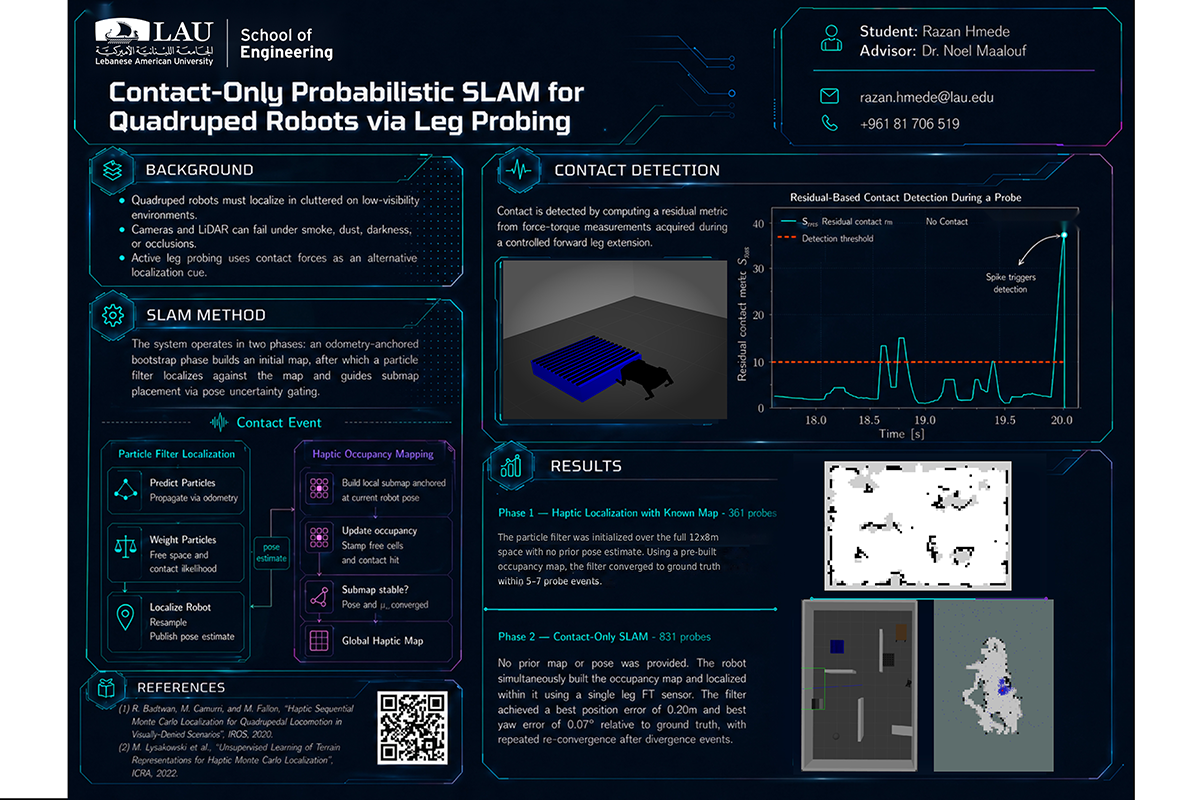
Contact-Only Probabilistic SLAM for Quadruped Robots via Leg Probing
Project Details
- Student(s): Razan Hmede
- Advisor(s): Dr. Noel Maalouf
- Department: Mechatronics
- Academic Year(s): 2025-2026
Abstract
This research project investigates the use of active haptic probing as an alternative sensing method for quadruped robot localization and mapping in environments where cameras, LiDAR, or depth sensors may be unreliable. The main idea is to treat one leg of a quadruped robot as an active contact sensor: the robot deliberately extends and moves the leg to probe nearby surfaces, then uses the measured force–torque response to infer information about its position and surrounding environment. In this work, active probing events were used to construct a contact-only haptic occupancy grid, where free space and occupied contact points were inferred from the robot’s probing motions. A particle-filter-based localization system was then implemented to estimate the robot’s pose by comparing new probing observations with the built haptic map. The project was also extended toward online haptic SLAM, where mapping and localization were combined so that the robot could incrementally build a sparse contact map while estimating its pose. Our implementation demonstrates that active leg probing can provide useful spatial information for localization and mapping without relying on traditional exteroceptive sensors.