Energy Efficiency in Quadruped Robots
Project Details
- Student(s): Wajih El Tayar
- Advisor(s): Dr. Noel Maalouf
- Department: Mechatronics
- Academic Year(s): 2025-2026
Abstract
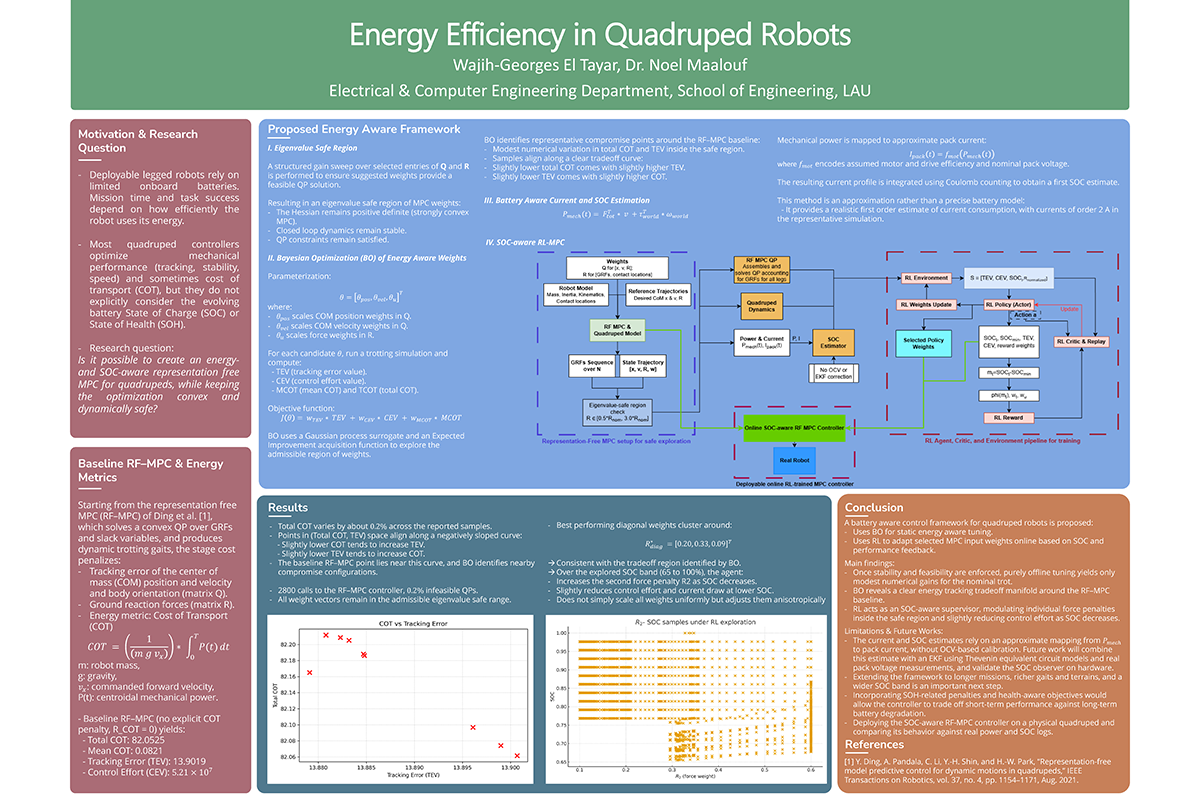
Legged robots such as quadrupeds can access environments where wheels struggle, but their endurance is limited by onboard batteries. This project develops an energy-aware locomotion framework that extends a representation-free Model Predictive Controller by incorporating a Cost of Transport metric, an estimated
battery State of Charge, and Bayesian optimization and reinforcement learning-based adaptation of key control weights. A stability-preserving range of MPC parameters is first identified, then Bayesian Optimization is used to map the trade-off between tracking performance and energy use. Finally, a reinforcement learning
agent adjusts selected MPC force penalties online based on SOC and performance feedback, encouraging more conservative energy usage as the battery depletes. This work provides a practical baseline for batteryaware quadruped control and sets the foundation for future deployment on real robots and for extending the
approach to battery health–aware strategies.