Time-Varying Robust Sampled-Data High-Order Control Barrier Functions With Variable Sampling
Project Details
- Student(s): Hassan Bitar
- Advisor(s): Dr. Noel Maalouf
- Department: Mechatronics
- Academic Year(s): 2025-2026
Abstract
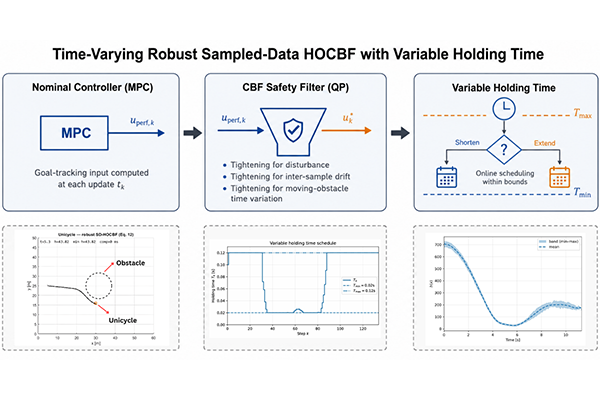
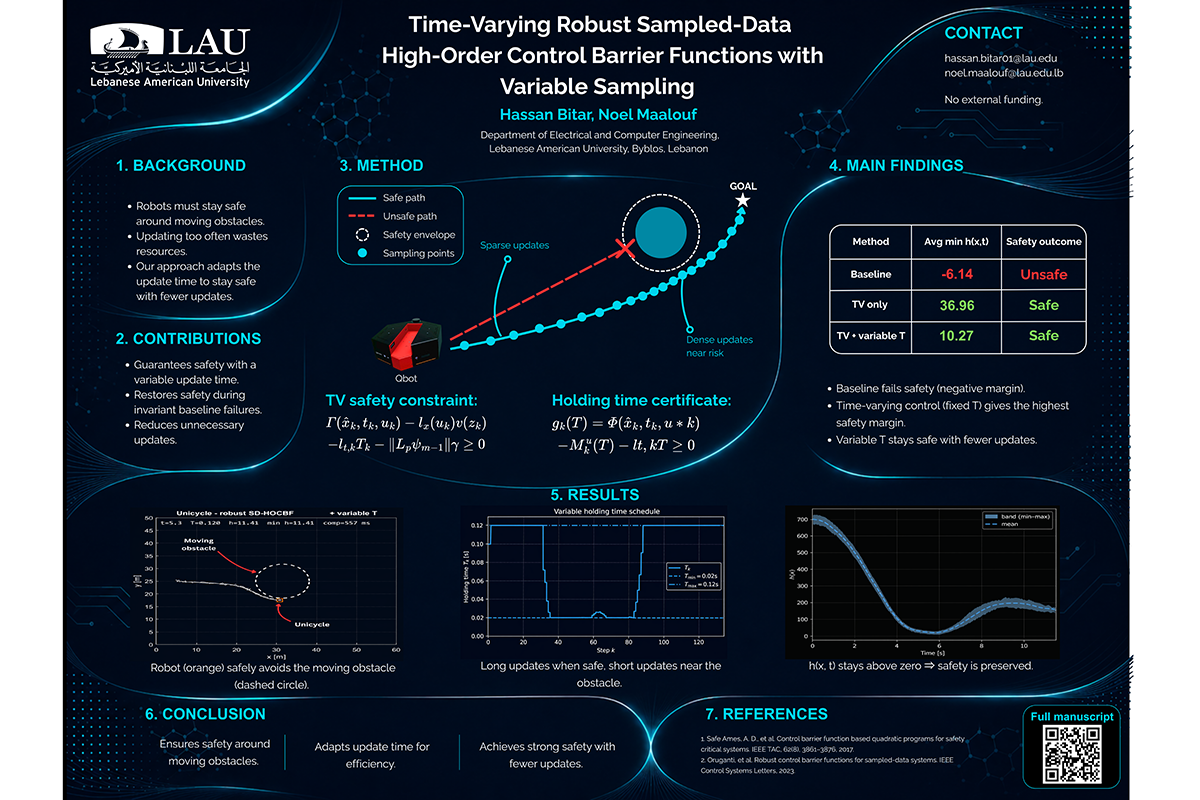
Safety-critical robotic systems often operate in dynamic environments where safety requirements evolve over time, such as in the presence of moving obstacles, while control actions are applied digitally and updated at discrete intervals. This work develops a robust sampled-data high-order control barrier function framework that explicitly accounts for time-varying safety constraints and uncertainty between control updates. The approach incorporates barrier time derivatives together with reachability-based tightening terms to guarantee safety throughout each sampling interval. In addition, a variable holding-time strategy is introduced that adapts the control update rate online according to the current safety margin, allowing less frequent updates when the system is far from constraint boundaries and faster updates when operating near safety-critical regions. The framework is validated through simulations of a unicycle robot navigating around moving obstacles and through experiments on a QBot digital twin, demonstrating improved safety guarantees and reduced conservatism compared with fixed-rate approaches.